Control of Mobile Robots- 2.2 Differential Drive Robots mouhknowsbest 8:13 11 years ago 109 001 Скачать Далее
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation Aleksandar Haber 16:12 9 months ago 5 598 Скачать Далее
2 2 Differential Drive Robots Control of Mobile Robots nikhil mittal 8:13 8 years ago 116 Скачать Далее
Control of Differential Drive Robots for Path Traversal Engineering Educator Academy 54:29 2 years ago 5 251 Скачать Далее
Kinematics of Differential Drive Robots and Odometry Engineering Educator Academy 50:55 3 years ago 28 453 Скачать Далее
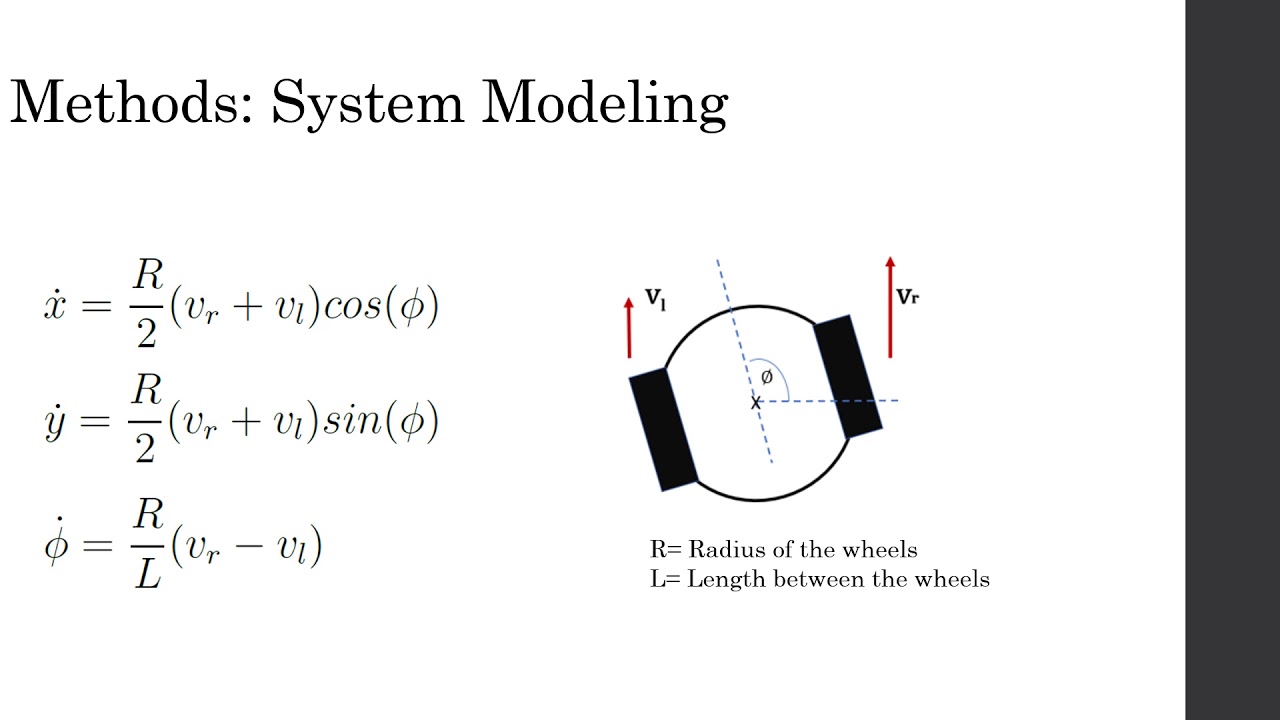
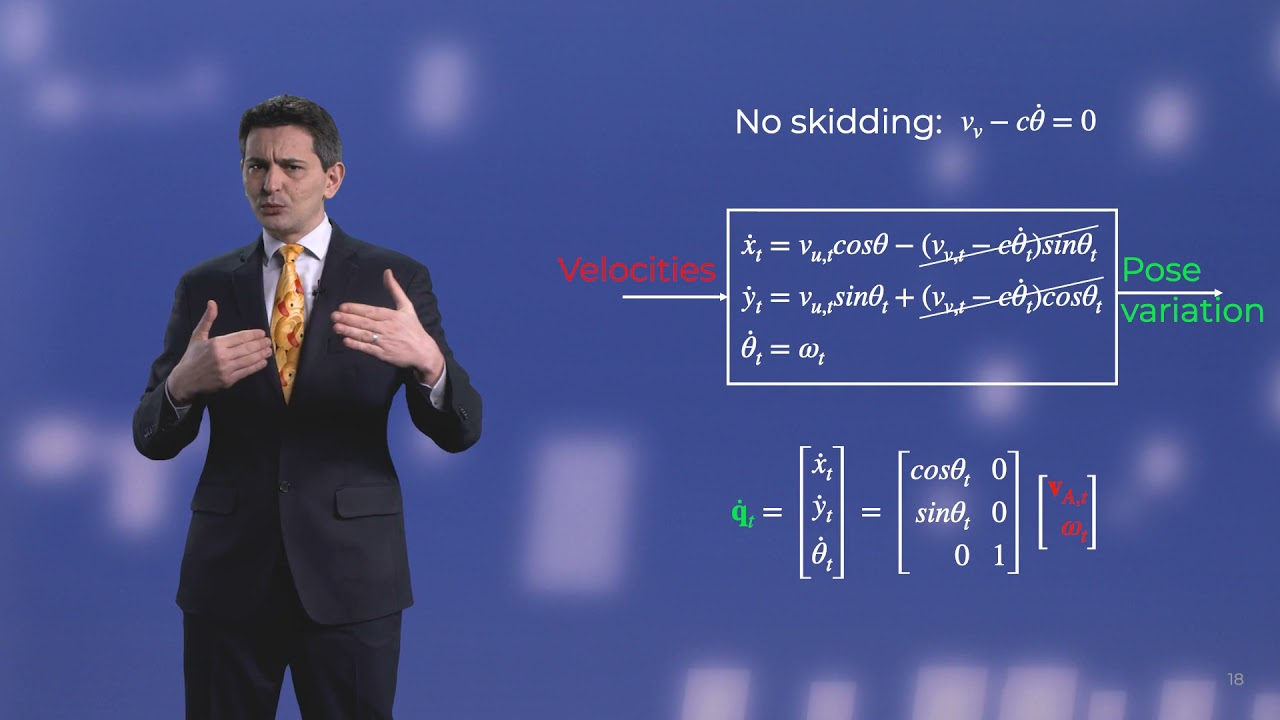
System Modeling: Path Tracking for Differential Steering Drive Autonomous Robots Computational Medicine Lab 4:37 4 years ago 10 919 Скачать Далее
Position control of a differential drive wheeled mobile robot v2 Gerardo Ort T 0:34 4 years ago 141 Скачать Далее
Modern Robotics, Chapter 13.3.2: Controllability of Wheeled Mobile Robots (Part 1 of 4) Northwestern Robotics 4:08 6 years ago 5 933 Скачать Далее
Detailed and Correct Derivation of Kinematics Equations of Differential Drive Mobile Robot Aleksandar Haber 16:28 9 months ago 5 767 Скачать Далее